Der Informatiker Timo Korthals vom Institut CITEC der Universität Bielefeld war drei Wochen an der Queensland University of Technology (QUT) in Australien. Er erzählt, was er dort erlebt hat – und was Roboter-Greifarme mit einem wissenschaftlichen Austausch gemeinsam haben.
„Das erste, was hier in Brisbane auffällt, liegt ganz abseits der Arbeit: Flora und Fauna sind viel farbenreicher als in Deutschland. Zurzeit ist Winter, was man sich wie den schönsten europäischen Frühling vorstellen kann. Statt Tauben sitzen Kakadus auf den Dächern. Ich habe schon öfters auf dem Weg zur Arbeit einen längeren Spaziergang gemacht, weil es so viel zu entdecken gibt.
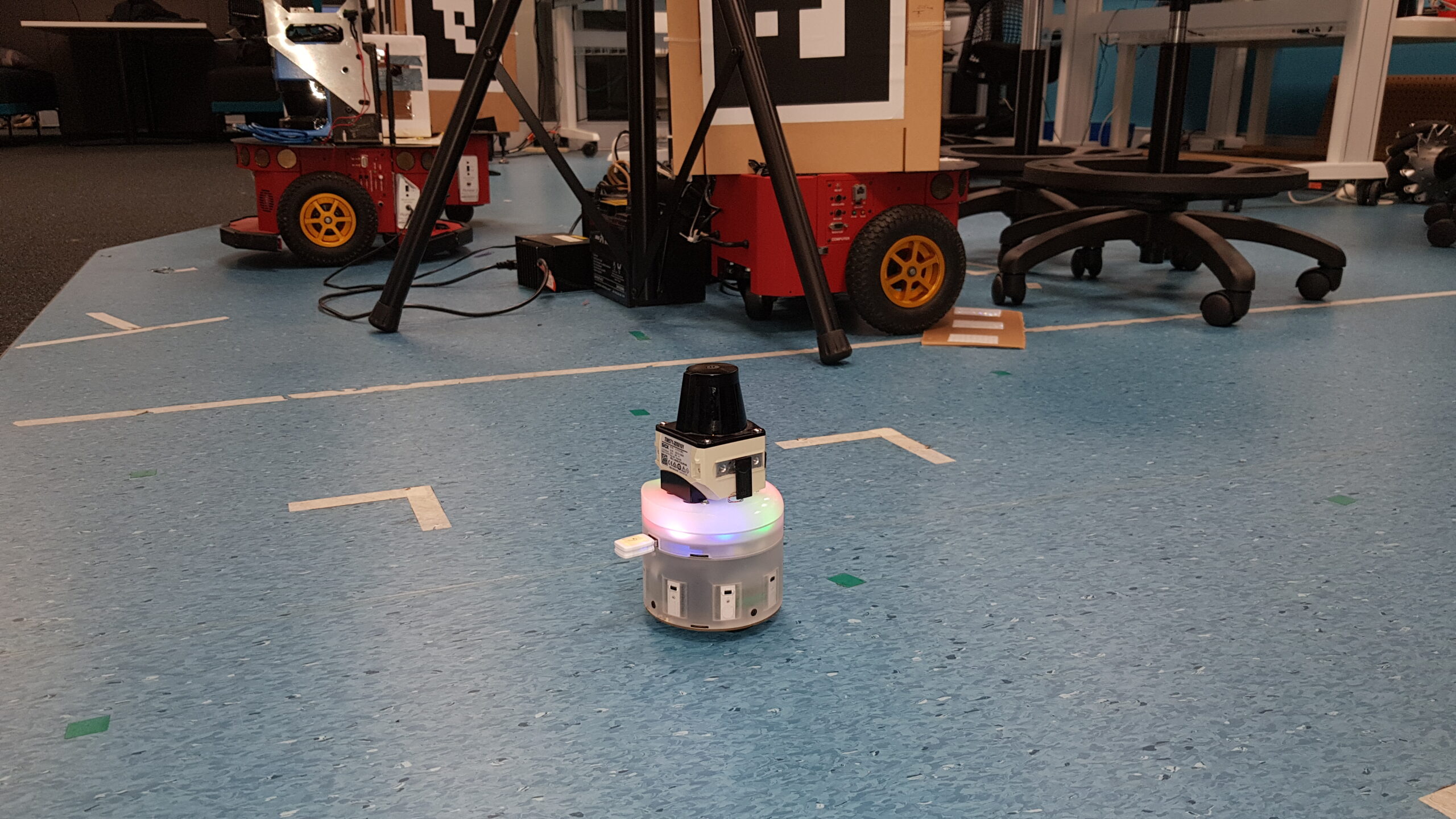
Ich arbeite hier vor allem mit dem Roboter „Franka Emika Panda“. Das ist ein Greifarm, der sich mit einer Kamera auf dem Greifer orientiert. Bei dem Verfahren zur aktiven Umfelderfassung, das ich teste, geht es darum, dass der Roboter selbst entscheiden soll, wann er ein vor sich liegendes Objekt erkannt hat und wie er seinen Blickwinkel verändern muss, um mehr Informationen zu erhalten.
Wie Roboter aus dem, was sie visuell wahrnehmen, Handlungen ableiten, ist die wichtigste Frage am Forschungszentrum „Australian Centre for Robotic Vision“. Am CITEC steht die Interaktion zwischen Menschen und Robotern im Vordergrund. Die Kolleginnen und Kollegen hier bearbeiten ähnliche Fragestellungen wie ich, haben aber trotzdem andere Sichtweisen. Deshalb ist es sehr wertvoll für mich, mit ihnen meine Arbeit zu diskutieren. Das ist für mich auch das Wichtigste an diesem Austausch. Ich fahre nicht in ein anderes Land, nur um in einem anderen Labor zu sitzen. Die Gespräche sind viel wertvoller als die Zeit vor dem Roboter.“



Timo Korthals’ Forschungsaufenthalt wurde durch den Deutschen Akademischen Austauschdienst (DAAD) gefördert.
Dieser Artikel ist eine Vorabveröffentlichung aus „BI.research“, dem Forschungsmagazin der Universität Bielefeld. Die neue Ausgabe des Magazins erscheint im November 2019.